Studying channel condition number while moving along a trajectory
[1]:
import numpy as np
import matplotlib.pyplot as plt
import matplotlib
from IPython.display import HTML
from neoradium import DeepMimoData, TrjChannel, Carrier, AntennaPanel, random
from neoradium.utils import toDb, toLinear
[2]:
# Replace this with the folder on your computer where you store DeepMIMO scenarios
dataFolder = "/data/RayTracing/DeepMIMO/Scenarios/V4/"
DeepMimoData.setScenariosPath(dataFolder)
# Create a DeepMimoData object
deepMimoData = DeepMimoData("asu_campus_3p5")
deepMimoData.print()
DeepMimoData Properties:
Scenario: asu_campus_3p5
Version: 4.0.0a3
UE Grid: rx_grid
Grid Size: 411 x 321
Base Station: BS (at [166. 104. 22.])
Total Grid Points: 131,931
UE Spacing: [1. 1.]
UE bounds (xyMin, xyMax) [-225.55 -160.17], [184.45 159.83]
UE Height: 1.50
Carrier Frequency: 3.5 GHz
Num. paths (Min, Avg, Max): 0, 6.21, 10
Num. total blockage: 46774
LOS percentage: 19.71%
[3]:
random.setSeed(123) # Make results reproducible
# Create the carrier:
carrier = Carrier(startRb=0, numRbs=25, spacing=15) # Carrier with 25 Resource Blocks, 15KHz subcarrier spacing
bwp = carrier.curBwp # The only bandwidth part in the carrier
# Create a random trajectory at waking speed.
trajectory = deepMimoData.getRandomTrajectory(xyBounds=np.array([[-210, 40], [-120, 100]]), # Traj. bounds
segLen=5, # Num grid points on shortest segment
bwp=bwp, # The bandwidth part
trajLen=100, # Number of grid points on trajectory
speedMps=15) # Speed in mps
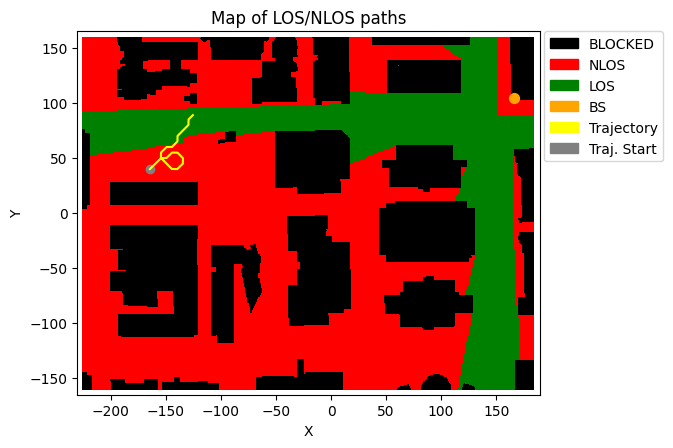
trajectory.print() # Print the trajectory information
deepMimoData.drawMap("LOS-NLOS", trajectory) # Draw the Map with the trajectory
Trajectory Properties:
start (x,y,z): (-164.55, 39.83, 1.50)
No. of points: 8227
curIdx: 0 (0.00%)
curSpeed: [10.64 10.64 0. ]
Total distance: 123.44 meters
Total time: 8.226 seconds
Average Speed: 15.006 m/s
Carrier Frequency: 3.5 GHz
Paths (Min, Avg, Max): 6, 8.99, 10
Totally blocked: 0
LOS percentage: 26.43%
[3]:
(<Figure size 742.518x471.734 with 1 Axes>,
<Axes: title={'center': 'Map of LOS/NLOS paths'}, xlabel='X', ylabel='Y'>)
[4]:
channel = TrjChannel(bwp, trajectory,
txAntenna = AntennaPanel([2,4]), # 8 TX antenna
txOrientation = [180,0,0], # TX antenna pointing to the left
rxAntenna = AntennaPanel([1,2]), # 2 RX antenna
seed = 123)
print(channel)
def getConditionNumber(channelMatrix):
# Condition Number:
# CN(H) = 20 log (sigmaMax/sigmaMin)
# **NOTE**: As you can see ``CN`` is given in logarithmic scale in db. The values between 0 and
# 10 db are usually considered good for beam-forming while the values above 20 db are considered
# unusable for beam-forming.
u, s, v = np.linalg.svd(channelMatrix)
cn = 2*toDb(s.max(2)/s.min(2))
return cn.min(), cn.mean(), cn.max()
# A call back function that is called to draw up to three graphs below the animated trajectory
prevInfo = [0,0,0,0]
def handleGraph(request, ax, trajectory, points=None):
if request=="Config":
# Configure all graphs
if len(ax)>0:
ax[0].set_xlim(0,trajectory.numPoints)
ax[0].set_title("Condition Number (dB)")
ax[0].grid()
if len(ax)>1:
ax[1].set_xlim(0,trajectory.numPoints)
ax[1].set_title("Number of paths")
ax[1].grid()
elif request=="Draw":
# For Draw: ax is an array of `numGraphs` elements
p0, p1 = points
cnMin, cnMean, cnMax, numPaths = [], [], [], []
while channel.trajectory.curIdx < p1:
channelMatrix = channel.getChannelMatrix() # Get the channel matrix
cn = getConditionNumber( channel.getChannelMatrix() )
cnMin += [cn[0]]
cnMean += [cn[1]]
cnMax += [cn[2]]
numPaths += [channel.numPaths]
channel.goNext()
cnMin, cnMean, cnMax, numPaths = min(cnMin), np.mean(cnMean), max(cnMax), np.mean(numPaths)
global prevInfo
prevMin, prevMean, prevMax, prevNumPaths = prevInfo
if len(ax)>0:
ax[0].plot([p0,p1], [prevMean, cnMean], 'red', markersize=1, label=f"Avg.")
ax[0].fill_between([p0,p1], [prevMin, cnMin], [prevMax, cnMax], color='pink', alpha=0.5, label='Range')
if len(ax)>1: # Set 'numGraphs' to 2 to draw the number of paths in the second graph
ax[1].plot([p0,p1], [prevNumPaths, numPaths], 'blue', markersize=1, label=f"Number of Paths")
prevInfo = [cnMin, cnMean, cnMax, numPaths]
print("\r Current Trajectory Point: %d (%d%%) "%(trajectory.curIdx,
trajectory.curIdx*100//trajectory.numPoints), end="")
TrjChannel Properties:
carrierFreq: 3.5 GHz
normalizeGains: True
normalizeOutput: True
normalizeDelays: True
xPolPower: 10.00 (dB)
filterLen: 16 samples
delayQuantSize: 64
stopBandAtten: 80 dB
dopplerShift: 175.6448069011776 Hz
coherenceTime: 0.0024090788399960396 sec
TX Antenna:
Total Elements: 8
spacing: 0.5𝜆, 0.5𝜆
shape: 2 rows x 4 columns
polarization: |
Orientation (𝛼,𝛃,𝛄): 180° 0° 0°
RX Antenna:
Total Elements: 2
spacing: 0.5𝜆, 0.5𝜆
shape: 1 rows x 2 columns
polarization: |
Trajectory:
start (x,y,z): (-164.55, 39.83, 1.50)
No. of points: 8227
curIdx: 0 (0.00%)
curSpeed: [10.64 10.64 0. ]
Total distance: 123.44 meters
Total time: 8.226 seconds
Average Speed: 15.006 m/s
Carrier Frequency: 3.5 GHz
Paths (Min, Avg, Max): 6, 8.99, 10
Totally blocked: 0
LOS percentage: 26.43%
[5]:
# Increase the animation memory limit to 100 MB
matplotlib.rcParams['animation.embed_limit'] = 100000000
# Now create the animation and display it in the following cell. This can take a while...
channel.restart()
anim = deepMimoData.animateTrajectory(trajectory, numGraphs=1, pointsPerFrame=20, graphCallback=handleGraph)
HTML(anim.to_jshtml())
Current Trajectory Point: 8200 (99%)
[5]: