Animating Trajectories
[5]:
import numpy as np
import os, time
import scipy
import matplotlib.pyplot as plt
import matplotlib
from IPython.display import HTML
from neoradium import DeepMimoData, TrjChannel, Carrier, Grid, Modem, AntennaPanel, random
from neoradium.utils import getNmse
[6]:
# Replace this with the folder on your computer where you store DeepMIMO scenarios
dataFolder = "/data/RayTracing/DeepMIMO/Scenarios/V4/"
DeepMimoData.setScenariosPath(dataFolder)
# Create a DeepMimoData object
deepMimoData = DeepMimoData("asu_campus_3p5")
deepMimoData.print()
DeepMimoData Properties:
Scenario: asu_campus_3p5
Version: 4.0.0a3
UE Grid: rx_grid
Grid Size: 411 x 321
Base Station: BS (at [166. 104. 22.])
Total Grid Points: 131,931
UE Spacing: [1. 1.]
UE bounds (xyMin, xyMax) [-225.55 -160.17], [184.45 159.83]
UE Height: 1.50
Carrier Frequency: 3.5 GHz
Num. paths (Min, Avg, Max): 0, 6.21, 10
Num. total blockage: 46774
LOS percentage: 19.71%
[7]:
random.setSeed(123) # Make results reproducible
# Create the carrier:
carrier = Carrier(startRb=0, numRbs=25, spacing=15) # Carrier with 25 Resource Blocks, 15KHz subcarrier spacing
bwp = carrier.curBwp # The only bandwidth part in the carrier
# Create a random trajectory at waking speed.
trajectory = deepMimoData.getRandomTrajectory(xyBounds=np.array([[-210, 40], [-120, 100]]), # Traj. bounds
segLen=5, # Num grid points on shortest segment
bwp=bwp, # The bandwidth part
trajLen=100, # Number of grid points on trajectory
speedMps=15) # Speed in mps
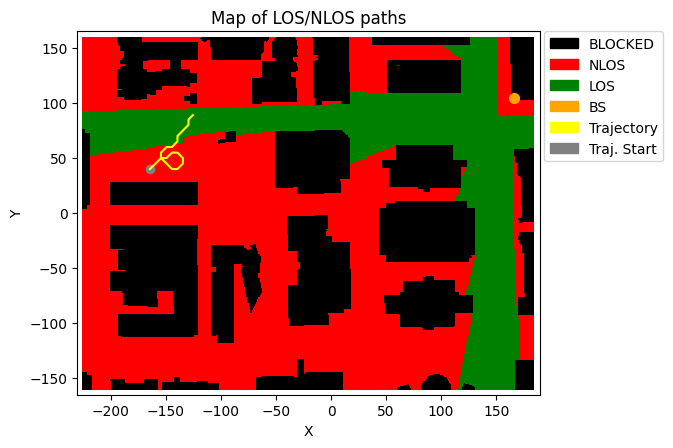
trajectory.print() # Print the trajectory information
deepMimoData.drawMap("LOS-NLOS", trajectory) # Draw the Map with the trajectory
Trajectory Properties:
start (x,y,z): (-164.55, 39.83, 1.50)
No. of points: 8227
curIdx: 0 (0.00%)
curSpeed: [10.64 10.64 0. ]
Total distance: 123.44 meters
Total time: 8.226 seconds
Average Speed: 15.006 mps
Carrier Frequency: 3.5 GHz
Paths (Min, Avg, Max): 6, 8.99, 10
Totally blocked: 0
LOS percentage: 26.43%
[7]:
(<Figure size 742.518x471.734 with 1 Axes>,
<Axes: title={'center': 'Map of LOS/NLOS paths'}, xlabel='X', ylabel='Y'>)
[8]:
# A call back function that is called to draw up to three graphs below the animated trajectory
def handleGraph(request, ax, trajectory, points=None):
if request=="Config":
# Configure all graphs
if len(ax)>0:
ax[0].set_xlim(0,trajectory.numPoints)
ax[0].set_ylim(0,1.2)
ax[0].set_title("Line of Sight Flag")
if len(ax)>1:
ax[1].set_xlim(0,trajectory.numPoints)
ax[1].set_ylim(900,1300)
ax[1].set_title("Delay of first path (ns)")
if len(ax)>2:
ax[2].set_xlim(0,trajectory.numPoints)
ax[2].set_ylim(-130,-80)
ax[2].set_title("Power of first path (db)")
elif request=="Draw":
# For Draw: ax is an array of `numGraphs` elements
p0, p1 = points
if len(ax)>0: ax[0].plot([p0,p1], [trajectory.points[p0].hasLos, trajectory.points[p1].hasLos], 'green', markersize=1)
if len(ax)>1: ax[1].plot([p0,p1], [trajectory.points[p0].delays[0], trajectory.points[p1].delays[0]], 'blue', markersize=1)
if len(ax)>2: ax[2].plot([p0,p1], [trajectory.points[p0].powers[0], trajectory.points[p1].powers[0]], 'red', markersize=1)
# Increase the animation memory limit to 100 MB
matplotlib.rcParams['animation.embed_limit'] = 100000000
# Now create the animation and display it in the following cell. This can take a while...
anim = deepMimoData.animateTrajectory(trajectory, numGraphs=3, graphCallback=handleGraph)
HTML(anim.to_jshtml())
[8]: